Ordinary Differential Equations
General for of an ODE
where
The highest order of the derivatives is called the order of the ordinary differential equation.
Instead we may know a relationship between variable
Initial Value Problem
The general form is a differential equation
where
- By involving more than one unknown variable (not just
): Systems of differential equations - By solving second, third, or higher derivatives (not just
): Higher order differential equations
Systems of Differential Equations
Consider a model with multiple variables that interact:
- E.g.
and coordinates of a moving object.
This gives a system of differential equations, such as
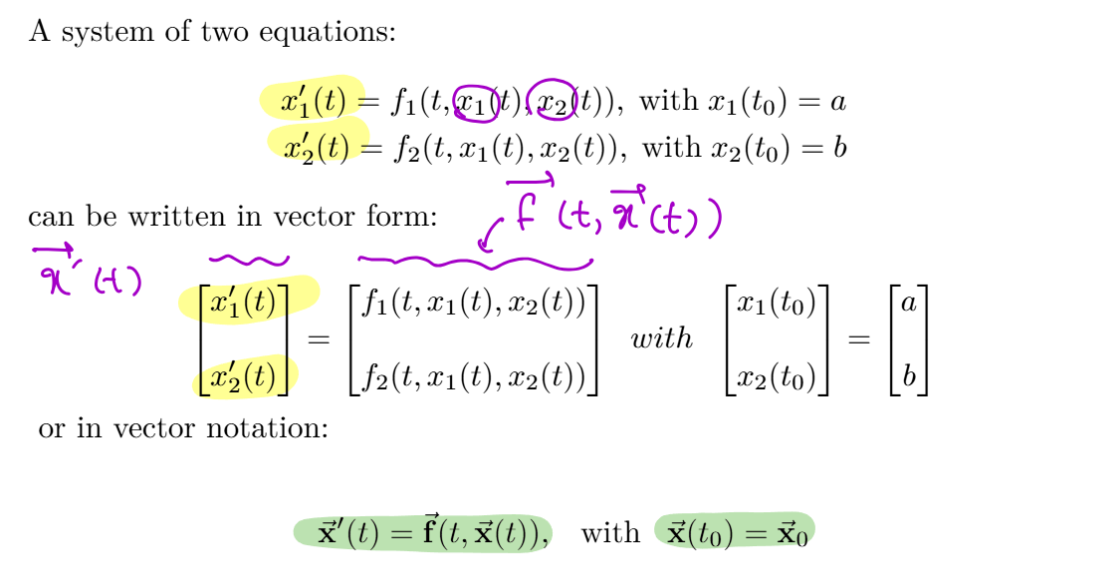
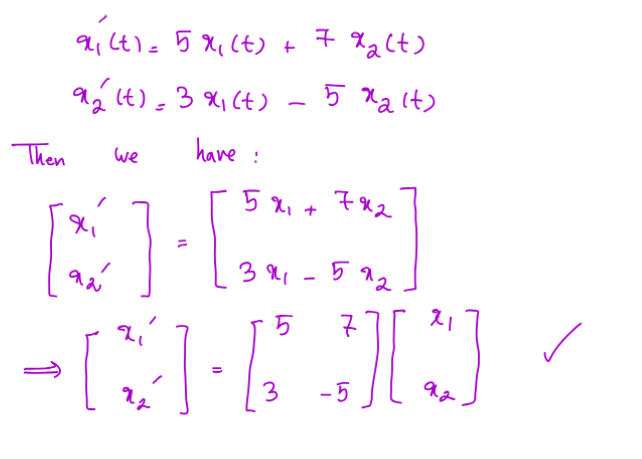
- The matrix notation is specially helpful when
and are linear - The
can be decomposed as a constant matrix and a vector containing the functions
- The
Higher Order Differential Equations
To start, we consider 1st order ODEs, involving only first derivative
Numerical Schemes for ODEs
Numerical solution is a discrete set of time/value pairs,
should approximate the true value,
Time-Stepping
Given initial conditions, we repeatedly step sequentially forward to the next time instant, using the derivative info,
Set
- Compute
- Increment time,
- Advance,
- Repeat
Categorizing time-stepping methods
Single-step vs Multistep:
- Do we use information only from he current time or from previous timesteps too?
Explicit vs Implicit: - Is
given as an explicit function to evaluate, or do we need to solve an implicit equation?
Timestep size: - Do we use a constant timestep
, or allow it to vary?
Trade-offs
Explicit:
- Simpler and fast to compute per step
- Less stable - require smaller timesteps to avoid “blowing up”
Implicit: - Often more complex and expensive to solve per step
- More stable - can safely use larger timesteps
Time-Stepping as a Recurrence
Time-stepping applies a recurrence relation to approximate the function values at later and later times
- Given
, approximate . Given , approximate . etc.
Time-Stepping as a “Time Integration”
Time-stepping is also known as “time-integration”:
- We are integrating over time to approximate
from - Approximating area under the curve
Better time-stepping schemes correspond to better approximations of the integral
- Approximating area under the curve
Error of Time-Stepping
Absolute / global error at step
- We can’t measure error exactly without knowing
- We will rely on the Taylor series
Forward Euler
Explicit, single-step scheme
- Compute the current slope:
- Step in a straight line with that slope:
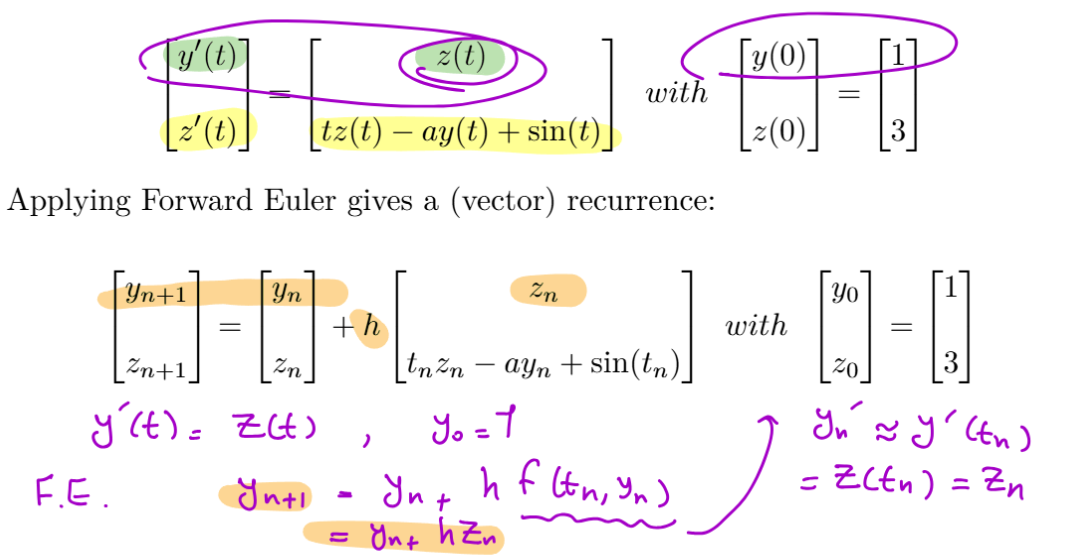
System of Equations
For systems of 1st order ODEs, we apply Forward Euler to each row in exactly the same way.
Error of Forward Euler Method
F.E. is $$y_{n+1} = y_n + hf(t_n, y_n)$$
Taylor series is:
The error for one step is the difference between these, assuming exact data at time
- i.e.
In this case, Forward Euler becomes:
The difference is:
This is the Local Truncation Error (LTE) of Forward Euler!
- As
decreases, LTE decreases quadratically
More accurate time-stepping
Keeping more terms in the series will help derive higher order schemes!
Trapezoidal Rule
Trapezoidal Scheme is:
The Local Truncation Error for trapezoidal rules is

Can we make it explicit?
Modified / Improved Euler
- Take forward Euler step to estimate the end point
- Evaluate slope there
- Use this approximate end-of-step slope in the trapezoidal formula
This looks like:
Explicit scheme with LTE
Backwards Euler Method
Implicit Scheme
- Similar to forward Euler
Its LTE is
Explicit “Runge Kutta” schemes

A family of explicit schemes (including improved Euler) written as:
4th Order Runge Kutta
LTE of
Similar schemes exist for higher orders,
Again, evaluate
Midpoint Method
Another explicit Runge Kutta scheme with LTE
Equivalent Expression
Local vs Global Error
The Global Error is the total error accumulated at the final time
- Global error is typically more important since our goal is to predict some final future value
For a constant step, computing from to end time
Then, for a given method we have:
i.e. one degree lower than LTE
Multi-step Schemes
One way to derive them is by fitting curves to current and earlier data points, for better slope estimates.
E.g. fit a quadratic to previous, current, and next step
Backward Differentiation Formulas Methods (BDF)
BDF1, BDF2, BDF3, etc.
- Number indicates order of global error
BDF1 = Backward Eular
Generalize the backwards Euler scheme
to higher order using earlier step info.
BDF2 uses current and previous step data:
BDF has LTE
General Form
The same approach extends to higher orders, yielding implicit schemes with the general form
With
Explicit Multistep Scheme
Adams-Bashforth
e.g. 2nd order:
LTE is
Higher Order ODEs
The order of the ODE is the highest derivative that appears
- e.g. an ODE with at most third derivates gives a 3rd order ODE
Converting to First Order
The general form for such a higher ODE looks like
We can convert them to systems of first order ODEs
- Change of variables
For each variablewith more than a first derivative, introduce new variables:
for
Substituting the new variables into the original ODE leads to:
- One first order equation for each original equation
- One or more additional equations relating the new variables
Stability of Time-Stepping Schemes
Since errors are generally
But, error/perturbations in initial conditions may lead to vastly different or incorrect answers.
If some initial error
Test Equation
We’ll consider a simple linear ODE, our “test equation”,
for constant
The exact solution is
- Tends to 0 as
Our Approach
- Apply a given time stepping scheme to our test equation
- Find the closed form of its numerical solution and error behaviour
- Find the conditions on the timestep
that ensure stability (error approaching zero)
Stability of Forward Euler
It is conditionally stable when
Stability of Backward/Implicit Euler
It is unconditionally stable
Large time steps still usually induce Large truncation error
Stability of Improved Euler
It is conditionally stable when
- Same as Forward Euler
Stability in general
For our linear test equation
For nonlinear problems, stability depends on
For systems of ODEs, stability relates to the eigenvalues of the “Jacobian” matrix
Truncation Error vs Stability
Stability tells us what our numerical algorithm itself does to small errors
Truncation error tells us how the accuracy of our numerical solution scales with time step
Determining LTE
- Replace approximations on RHS with exact versions
- Taylor expand all RHS quantities about time
- Taylor expand the exact solution
to compare against - Compute difference
. Lowest degree non-cancelling power of gives the LTE
Time Step Control
Trade-offs
Smaller
Larger
Minimize effort/cost by choosing largest
Adaptive Time-Stepping
Rate of change of the solution often varies over time!
- Adapt the time step during the computation to keep error small, while minimizing wasted effort
If we knew the error for a given
… but if we already knew the exact error, we’d also know the solution
Approach
Use two different time-stepping schemes together. Compare their results to estimate the error, and adjust
Adaptive Time-Stepping using Order
Idea:
- Run 2 methods simultaneously with different truncation error orders
- Approximate the error as
where has and has - If err > threshold, reduce
(halve it) and recompute the step again, until the threshold is satisfied - Estimate the error coefficient
as
where
plug in
Given a desired error tolerance
To (roughly) compensate for our approximations, we may be conservative by scaling