Numerical Linear Algebra
The study of algorithms for performing linear algebra operations numerically
- Matrix/vector arithmetic
- Solving linear systems of equations
- Taking norms
- Factoring & inverting systems of equations
- Finding eigenvalues/eigenvectors
Numerical methods often differ from familiar exact methods, due to: - efficiency concerns
- floating point error
- stability
- etc.
Page Rank
Idea: If many web pages link to your website, there must be a consensus that it is important
Web Links as a Graph
We represent the web’s structure as a directed graph
- Nodes (circles) represent pages
- Arcs (arrows) represent links from one page to another
We will use degree to refer to a node’s outdegree - the number of arcs leaving the node
Adjacency Matrix
Then the degree for node
Notice: Matrix
Interpreting Links as Votes
If page
- Outgoing links of a page
have equal influence, so the importance that gives to is: $$\frac{1}{deg(j)}$$
Global Importance
If page
- What if page
has just one incoming link, but the link is from page , and has many incoming links? - Then
is probably fairly important too!
- Then
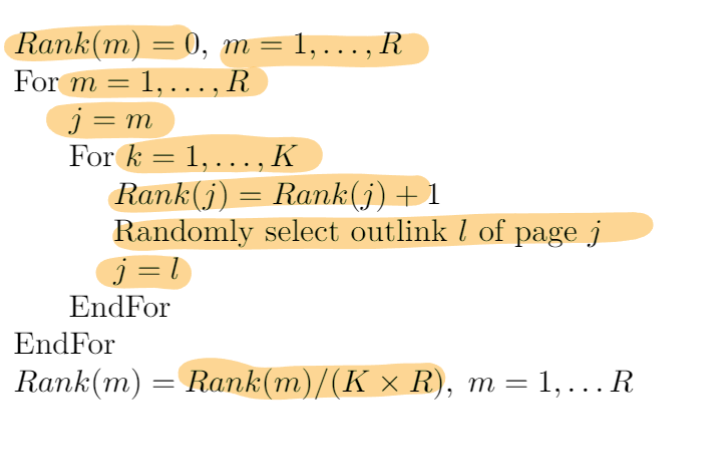
The Random Surfer Model
Imagine an internet user who starts at a page, and follows links at random from page to page for K steps
- They will probably end up on important pages more often
Then, select a new start page, and followrandom links again. Repeat the process times, starting from each page.
At the end, we estimate overall importance as:$$\text{Rank(page i) = (Visits to page i)/(Total visits to all pages) = (Visits to page i)/()}$$
Criticisms
Potential issues with this algorithm?
- The number of real web pages is monstrously huge
- ~1 billion unique hostnames
- many iterations needed
- Number of steps is taken per random surf sequence must be large, to get a representative sample
- What about dead end links?
- stuck on one page!
- What about cycles in the graph?
- Stuck on a closed subset of pages
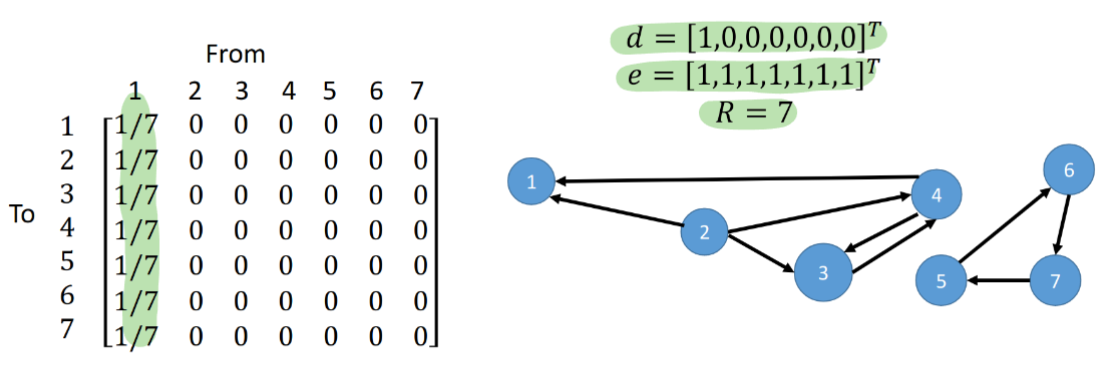
A Markov Chain Matrix
Let
We can build this matrix
- Divide all entries of each column of
by the column sum (out-degree of the node)
Dead Ends
To deal with dead-end links, we will simply teleport to a new page at random!
- if
is the number of pages, we augment to get defined by:$$P' = P+\frac{1}{R}ed^T$$ - The matrix
is a matrix of probabilities such that from any dead end page , we transition to every other page with equal probability
Escaping Cycles
Most of the time (a fraction
- Occasionally wish some probability,
, teleport from any page to any other page with equal probability, regardless of links$$M=\alpha P'+(1-\alpha)\frac{1}{R}ee^T$$ - The
matrix looks like:
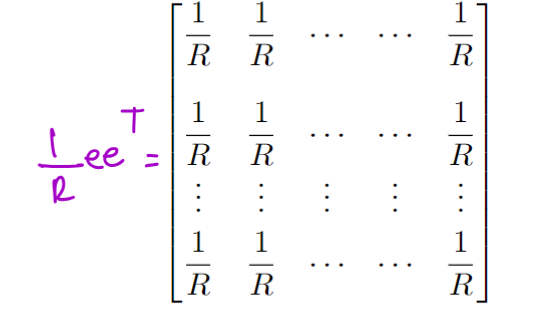
We will call the combined matrixour Google matrix - Most of the time this just follows links
- and always teleports out of dead ends
- Also occasionally teleports randomly to escape cycles
Google purportedly used
The sum of each column is 1
Some Useful Properties of
The entries of
Each column of
Interpretation: If we are on a webpage, probability of being on some webpage after a transition is 1
- we can’t just disappear
Markov Transition Matrices
The Google Matrix
We define a Markov matrix
Probability Vector
Now, define a probability vector as a vector
If the surfer starts at a random page with equal probabilities, this can be represented by a probability vector, where
- If a surfer starts at a specific page, that entry will have probability 1 and others will have probability 0
Evolving the Probability Vector
Now we have:
- the probability vector describing the initial state,
- a Markov matrix
describing the transition probabilities among pages
Their producttells us the probabilities of our surfer being at each page after one transition
Preserving a Probability Vector
If
- Yes!
Page Rank Idea
With what probability does our surfer end up at each page after many steps, starting from
- i.e. What is
? - higher probability in
implies greater importance - then we can rank the pages by this importance measure
Questions:
- then we can rank the pages by this importance measure
- Do we actually know if it will settle/converge to a fixed final result
- If yes, then how long will it take? Roughly how many iterations are needed before we can stop?
- Can we implement this efficiently?
Making Page Rank Efficient
How can we apply/implement Page Rank in a way that is computationally feasible?
- We’ll exploit precomputation and sparsity
Precomputation
The ranking vector
- to later search for a keyword, Google finds only the subset of pages matching the keywords, and ranks those by their precomputed values in
Sparsity
In numerical linear algebra, we often deal with two kinds of matrices
- Dense: Most or all entries are non-zero. Store in an
array, manipulate “normally” - Sparse: Most entries are zero. Use a “sparse” data structure to save space and time
- prefer algorithms that avoid “destroying” sparsity
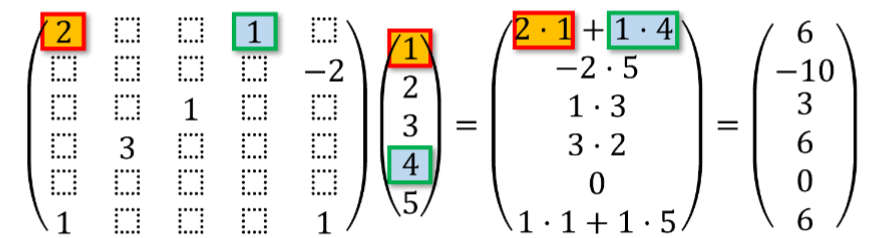
Sparse Matrix-Vector Multiplication
Multiplying a sparse matrix with a vector can be done efficiently
- Only non-zero matrix entries are ever accessed/used
Exploiting Sparsity
Note:
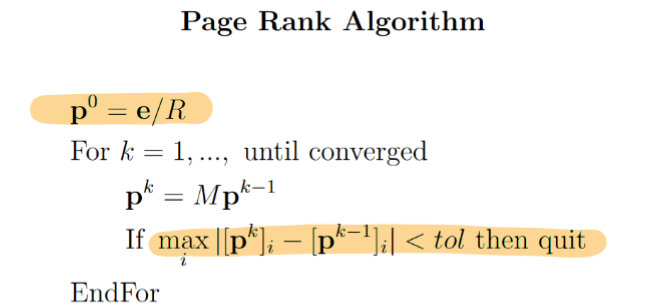
The trick: Use linear algebra manipulations to perform the main iteration$$p^{n+1}=Mp^n$$without ever creating/storing
Recall:
Consider computing:
We never form
Given this efficient/sparse iteration, loop until the max change in probability vector per step is small (< tol)
Google Search: Other Factors
Page Rank can be “tweaked” to incorporate other (commercial?) factors.
Replace standard teleportation
- In modern search engines, many factors beside pure link-based ranking can come into play
Convergence of Page Rank
We will need some additional facts about Markov Matrices, involving eigenvalues and eigenvectors
Eigenvalues and Eigenvectors
An eigenvalue
Equivalently, this can be written as$$Qx=\lambda I x$$where
Rearranging gives$$(\lambda I - Q)x = 0$$which implies that the matrix
Singular
A singular matrix
Thus to find the eigenvalues
plug
Properties
det(A − λI) = 0 → eigenvalues
- tr(A) = sum of eigenvalues
- det(A) = product of eigenvalues
- A invertible ⇔ 0 not an eigenvalue
- A diagonalizable ⇔ n lin. indep. eigenvectors
- Symmetric ⇒ diagonalizable w/ real eigenvalues
- Triangular ⇒ eigenvalues = diagonal entries
Convergence Properties
- Every Markov matrix
has 1 as an eigenvalue - Every eigenvalue of a Markov matrix Q satisfies
- So 1 is the largest eigenvalue
- A Markov matrix
is a positive Markov matrix if - If
is a positive Markov matrix, then there is only one linearly independent eigenvector of with
The number of iterations required for Page Rank to converge to the final vectordepends on the size of the 2nd largest eigenvalue,
- Then 2nd largest eigenvalue dictates the slowest rate at which the unwanted component of
are shrinking
Result
For google matrix,
- where
dictated the balance between following real links, and teleporting randomly
After 114 iterations, any vector components of
- The resulting vector
is likely to be a good approximation of the dominant eigenvector,
A smaller value of
- Should we speed it up by choosing a small
?
NO!implies only random teleportation. trades off accuracy for efficiency
Gaussian Elimination
Solving Linear Systems of Equations
Cost of Triangular Solve
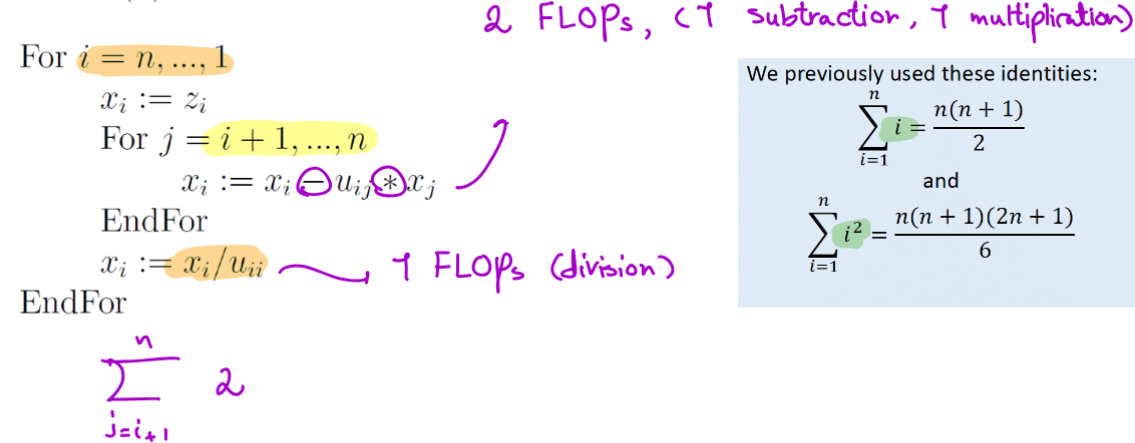
Triangular solves cost
Factorization cost dominates when
- Given an existing factorization, solving for new RHS’s is cheap:
Row Subtraction via Matrices
Zeroing a (sub-diagonal) entry of a column by row subtraction can be written as applying a specific matrix
where
is the original matrix is the matrix after subtracting the specific row
can be written as a matrix:
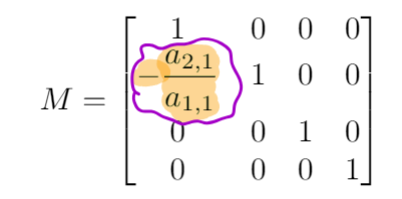
is the identity matrix, but with a zero entry replaced by the (negative of the) necessary multiplicative factor
So, the whole process of factorization can be viewed as a sequence of matrix (left-)multiplications applied to- The matrix left at the end is
Therefore:
- Define
and we have our factorization!
Interleaving the permutation matricesbefore each similarly leads to the factorization
Inverse of
What is
- The inverse of the simple matrix form is the same matrix, but with the off–diagonal entry negated
Costs: Solving
An obvious alternative for solving
- Inver
to get - Multiply
to get
One can show that the above is actually more expensive than using our factor and triangular solve strategy
- It also generally incurs more floating point error
- Most numerical algorithms avoid ever computing
Norms and Conditioning
Norms are measurements of “size”/magnitude for vectors or matrices
Conditioning describes how the output of a function/operation/matrix changes due to changes in input
Vector Norms
There are many reasonable norms for a vector,
Common choices are:
- 1-norm (or taxicab/Manhattan norm):
- 2-norm (or Euclidean norm):
-norm (or max norm):
These are collectively called
- Only holds in the limit for
case
Key Properties of Norms
If the norm is zero, then the vector must be the zero-vector
The norm of a scaled vector must satisfy
The triangle inequality holds:
Defining Norms for Matrices
Matrix norms are often defined/”induced” as follows, using
- Clearly we can’t try out all possible
to determine this - There are simpler equivalent definitions in some cases:
- Max absolute column sum
* Max absolute row sum
Matrix 2-norm
Using the vector 2-norm, we get the matrix 2-norm, or spectral norm:
The matrix’s 2-norm relates to the eigenvalues
Specifically, if
Matrix Norm Properties
for all scalar
Conditioning of Linear Systems
Conditioning describes how the output of a function/operation/problem changes due to changes in input
- Conditioning is indicative of how difficult a problem is to solve, independent of the algorithm/numerical method used
- Norms are useful in understanding linear system conditioning
For a linear system
- How much does a perturbation of
cause the solution to change? - How much does a perturbation of
cause the solution to change?
For a given perturbation, we say the system is:
- Well-conditioned if
changes little - Ill-conditioned if
changes lots
For an ill-conditioned system, small errors can be radically magnified!
Geometric Intuition: Line Intersection
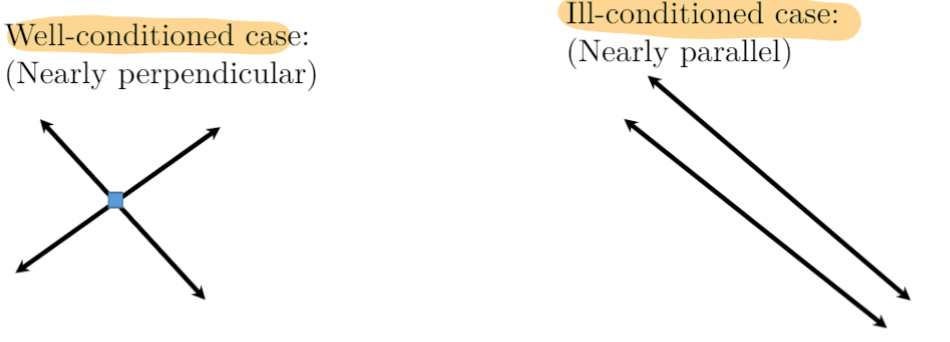
Well-conditioned case: Nearly perpendicular lines
Ill-conditioned case: Nearly parallel lines
Condition Number Summary
Condition number of a matrix
is well-conditioned is ill-conditioned
For systemprovides upper bounds on relative change in due to relative change in
or in
We defined the condition number as
without specifying which norm. Different norms will give different
We can specify the norm with a subscript, e.g., $$\kappa(A)_2=|A|_2\cdot|A^{-1}|_2$$
If unspecified, always assume the 2-norm
Equivalence of Norms
The norms we’ve looked at differ from one another by no more than a constant factor
That is$$C_1|x|_a\leq |x|b\leq C_2|x|_a$$
for constants
Numerical Solutions: Residuals and Errors
Condition number plays a role in understanding/bounding the accuracy of numerical solutions
If we compute an approximate solution
- we need the exact solution
for comparison - recall: relative error =
Residual
As a proxy for error, we often use the residual
i.e., by how much does out computed solution fail to satisfy the original problem?
- This we can compute easily!
- We know
our computed
Residual vs Errors
Assuming
So, applying our earlier bound using
Interpreting this Bound
The solution’s relative error,
Moral: If we (roughly) know
- if
, a small residual indicates a small relative error - But, if
is large, residual could still be small while error is quite large! - Again, this is independent of the algorithm used to compute
- Again, this is independent of the algorithm used to compute
Use of the Residual - Iterative Methods
Many alternate algorithms for solving
- Similar to PageRank, they iteratively improve a solution estimate
- Size of residual dictates when to stop
Gaussian Elimination & Error
In floating point, Gaussian elimination with pivoting on
- GE’s numerical result
gives the exact solution to a nearby problem (i.e. with perturbed )
where
Again, applying our earlier bound gives
e.g. if
Conditioning is algorithm-independent
Condition is a property of the problem itself
- not a property of a particular algorithm
- i.e., A system
is well- or ill-conditioned, independent of how we choose to solve it
Even an “ideal” numerical algorithm can’t guarantee a solution will small error if