Floating Point Numbers
Floating Point Number Systems
Real Numbers
- Infinite in extent
- There exists
such that is arbitrarily large
- There exists
- Infinite in density
- Any interval
contains infinitely many numbers
- Any interval
Floating point systems
- An approximate representation of real numbers using a finite number of bits
Normalized Form of a Real number
After expressing the real number in the desired base
where:
are digits in base - normalized implies we shift to ensure
- exponent
is an integer
Density (or precision) is bounded by limiting the number of digits
Extent (or range) is bounded by limiting the range of values for exponent
for
The four integer parameters
Overflow / Underflow Errors
- If the exponent is too big or too small, our system cannot represent this number
- For underflow, answer rounds to 0
- For overflow, will typically produce a
or NaN
Floating Point Standards
IEEE Single Precision (32 Bits):
IEEE Double Precision (64 Bits):
Floating Point Density
Rounding vs. Truncation
Round-to-nearest
Rounds to closest available number in
- Usually the default
- We’ll break ties by simply rounding
up
Truncation
Rounds to next number in
- Simply discard any digit after
Measuring Error
Difference between
We distinguish between absolute error and relative error.
- Is independent of the magnitudes of the numbers involved
- Relates to the number of significant digits in the result
A result is correct to roughly
Floating Point vs. Reals
For FP system
Machine Epsilon
The maximum relative error,
It is defined as the smallest value such that
We have the rule
For an FP system (
- rounding to nearest:
- truncation:
Arithmetic with Floating Point
What guarantees are there on a FP arithmetic operation?
IEEE standard requires that for
Result is order-dependent; associativity is broken!
Round-off Error Analysis
What can we say about
Let us use
This analysis describes only the worst case error magnification. Actual error could be much less.
Behaviour of Error Bounds
We showed that
The term
Cancellation Errors
When is
- when
- this occurs when quantities have differing signs and similar magnitudes
Catastrophic cancellation occurs when subtracting numbers about the same magnitude, when the input numbers contain error.
- All significant digits may cancel out.
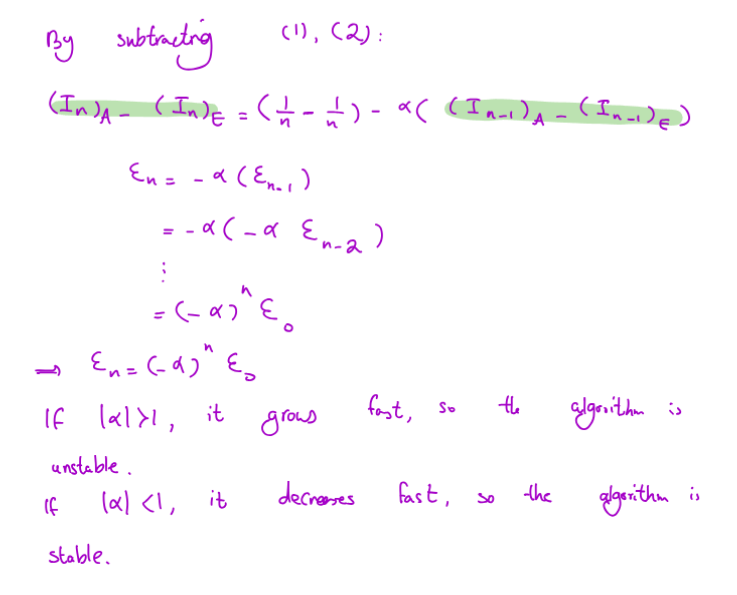
Stability of Algorithms
If any initial error in the data is magnified by an algorithm, the algorithm is considered numerically unstable.
Conditioning of Problems
For problem
- This is a property of the problem itself, independent of any specific implementation.
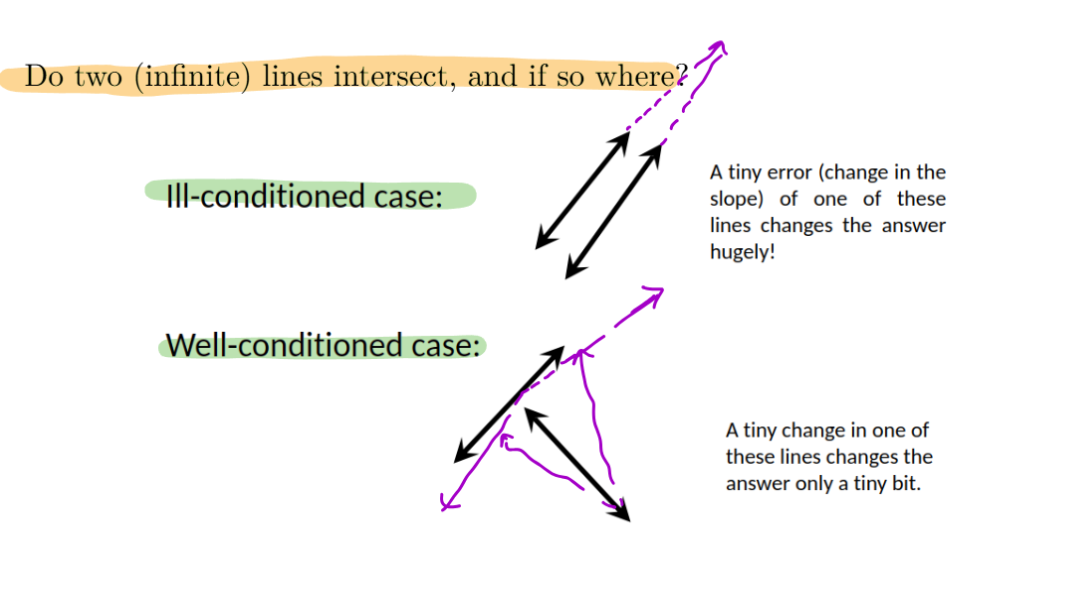
Conditioning vs. Stability
Conditioning of a problem:
- How sensitive is the problem itself to errors or changes in input?
Stability of a numerical algorithm: - How sensitive is the algorithm to errors or changes in input?
Note that:
- An algorithm can be unstable even for a well-conditioned problem!
- An ill-conditioned problem limits how well we can expect any algorithm to perform
Stability Analysis of an Algorithm
We can analyse whether errors accumulate or shrink to determine the stability of algorithms